Artists have long demonstrated their potential to explore and discover unexpected uses of new and existing technologies and to develop methods and apparatus with a vast potential for transferability into multiple realms, including engineering and technology as a whole.
— Hubert Reeves
ICRA 2019 in Montreal will be the first main robotic international conference to address directly the importance of the artistic contributions to the field of robotic research, and to its social and cultural impacts. While most robotic conferences (HRI, IROS, ICRA, CHI, etc.) featured satellite events (social nights and workshops) dedicated to robotic art, none has yet integrated such contributions in a mainstream manner.
We are excited to present the 2019 edition of ICRA-x Robots and Art program which culminates a decade of practice and research at the intersection of two broad disciplines, Robotics and the Arts. This edition will include a curated collection of robotic art installations by leading artists/roboticists integrated within the main ICRA program, a curated student program and a full-day forum with exciting guest speakers and an expert panel.
Forum: Expressive Motions
Room 518ab
22 May 2019
The forum includes two invited sessions with a mix of prominent artists and researchers, an interactive session with short presentations selected through an open call for participation/peer-reviewed and an expert panel.
Invited Session I (9:40-10:55)
9:40 |
Behavior and Misbehavior: A Path to Believable Living MachinesBill Vorn – Professional Artist, Professor at Concordia University |
10:00 |
Motion as Artistic MatterJean-Paul Laumond – Professor and Directeur de Recherche at CNRS |
10:20 |
RebornJustine Emard, Professional Artist |
10:40 |
Innovation: a creative drive for Moment FactoryGuillaume Bourassa– Director R & D, Moment Factory |
10:55 |
Coffee Break |
Expert Panel (11:30 – 12:45)
11:30 |
Articulating the Complicated Linkage between Art and RobotsModerator: Evan Ackerman (IEEE Spectrum contributing editor) Panellists:
|
12:45 |
Lunch |
Invited Session II (16:00 -17:00)
16:00 |
Robo-Exoticism: The Expressive Motions and Emotions of Our All Too Human MachinesKen Goldberg, UC Berkeley |
16:20 |
How Robot Motions Influence Human BehaviorHeather Knight – Asst Professor at Oregon State University |
16:40 |
Trace of MotionGuillaum Credoz, founder of Bits to Atoms, Professional Artist |
Interactive Session (17:00 – 17:30)
17:00 |
This is a selection of extended abstracts accepted through an open call and a peer-review process. Please click here for the full list of presentations. |
image: TheObsessiveDrafter, Guillaume Credoz
Exhibition: CoExistence
20-22 May 2019
Curated by:
Alain Thibault – General and Artistic Director
Curator and artistic director in the fields of digital arts, electronic music and sound art, Alain Thibault is also the founder of two major events in Montreal, ELEKTRA – an annual festival showcasing performances in the digital arts, and the BIAN, International Digital Arts Biennial, oriented towards exhibitions, installations and public art. Also an electronic music composer, his work is largely disseminated throughout Canada and international scene.
ELEKTRA is an international media and contemporary digital art organization based in Montreal (Quebec, Canada) presenting artists and works that combine creative technological genres, such as music, video, cinema, performance, design, audio, art games and interactive arts. The ELEKTRA Festival is its major annual event. Since 1999, ELEKTRA has featured local, national and international performers. In tandem with the Festival, every year ELEKTRA holds the International Marketplace for Digital Art. Since 2012, ELEKTRA is also the producer of the BIAN, the International Digital Art Biennale, focusing on new media installations, exhibitions and public art.







Student Exhibition
20-22 May 2019
Co-curated by:
Alexandre Castonguay is a Darkness designer and príncipe descolonizador, who approaches different artistic forms suggesting modes of exchange and interaction inspired by the relational dynamics of information flows. He is a professor at the École des arts visuels et médiatiques (EAVM) of the Université du Québec à Montréal (UQAM) and a member of the Hexagram network. His creations have circulated, amongst other places, at Piksel (Norway), the 11th Transmediale (Berlin), the Festival International d’Art Vidéo de Casablanca (Morocco) and Montreal’s Museum of Contemporary Art. artengine.ca/acastonguay
Jean-Pierre Gauthier is Artist In-Residence and also teach (2018/2019) in Intermedia (Video, performance and electronics)program at the Department of Studio Arts at Concordia University. His work pursues a hybrid approach in which he combines visual art and the musical conception around kinetic and sound installations, invented or automated music instruments.
For the first time, ICRA will host a robotic art exhibition for students. The student participation at this conference have always paved the future of the robotics research, with art students, we expect to increase the collaboration opportunities and stimulate the interest from both the engineering and art realms.
Robotic classes have been part of the art curriculum since at least a decade already and this exhibition will testify to the technical knowledge acquired through these programs. In tandem with the development and the democratization of access to electronics and robotics knowledge through open source hardware and software, students are introduced to basic general notions of electricity and magnetism, energy transfer, radio and telecommunications. The classes afford a focus on the study of human-machine ergonomics, notions of the interconnectedness between disciplines and agency through art-making and the design and realization of electronic circuits, microcontrollers, interfaces, sensors, network components, robots, mechanisms and mobile structures, with a focus on the study of man-machine ergonomics issues.
Their background includes the theory and history of robotics and kinetic art. Students can develop physical structures that move and act in order to support a conceptual process, elicit emotions, narratives or any of other kinds of human construct.
Final Program
Robo Zoltar Machine, 2018
George Tucci, University Concordia, Intermedia, Studio Arts
Like a magic 8 ball, you ask it a yes/no question and press a button and it will give you 1 of 6 different answers. There is a set of eyes with a random blink and the eyes color track using MaxMSP. There are servos controlling the eyes, blink and jaw movement. It also has neo-pixel L.E.D’s that does a chase pattern every time the button on the control box is pressed. The L.E.D’s change colors with each new press. All skull parts are 3D printed. The face was sculpted, molded and cast in silicone. There are 2 Arduino microcontrollers controlling it. One is for controlling the neo-pixel L.E.D’s and the other for communication with MaxMSP for control of the servos.
Robo Zoltar machine was created by Concordia Fine Arts Student George Tucci. Since 1999 George has been working in the film industry as a special effects make-up artist. Making monsters and puppets in Montreal for Hollywood films and television shows. He has created special effects for such films as 300, Day After Tomorrow, and The Smurfs just to name a few. In 2007, George was a co-host of a children’s TV show called Prank Patrol where George helped children design and create different kinds of creations to pull jokes on their friends. In 2017 George returned to school at Concordia University to further his artistic abilities, where his passion for puppets and robotic art was nurtured. There he was given an opportunity to create and show some of his own creations while learning new techniques that would bring his art to a higher level. At the same time, learning and using new technologies such as 3d printing and microcontroller programming that would give him the ability and skills to bring his creations to life.
Sentitweet, 2017
Marion Schneider, UQAM École des arts visuels et médiatiques
A Twitter bot analyses world’s tweets with the keywords « This artwork is » to give the artwork a value thanks to an open source sentiment analysis algorithm. The value is then diplayed in real time by a screen and the most sentimental tweets are printed on a receipt paper roll where we can read Twitter user’s opinion on art.
Marion Schneider is an artist who works with the political and poetical of today’s technologies. She has a BFA in graphic design (Ensaama Olivier de Serres, Paris) and a BFA in visual arts (UQAM, Montréal). Her work has been seen in Montréal (Place des Arts, Art Mûr, Galerie de l’UQAM, Maison de la culture du plateau Mont-Royal …), Québec (Pavillon Alphonse Desjardins) and Paris (Gaïté Lyrique). She is a laureate of the Macc Abbie grant and the Jean-Pitre and Claude Leclerc price.
Pero sans Cimon, 2019
Emma Forgues & Sam Bourgault, University Concordia, Intermedia, Studio Arts
Our investigation begins with the mechanization of the woman body in the contemporary context: the
woman body as artificial intelligence, as a sexual machine, as an assistant robot, essentially as a mean of production. Looking at technological and cultural examples, the future of personal assistant seems to be female. Amazon’s Alexa, Hanson Robotics’ Sophia, Project Aiko, Ex Machina’s Ava, Apple’s Siri, are all famous AI/robots that have been created and identified as female. Progress doesn’t seem to step away from binary culture, heteronormativity and gender stereotypes.
The idea of the woman body as a machine goes back to the first century before Christ. One of the first occurrences is told through the story of “Roman Charity” (1610-14) . In this tale, Pero, the daughter of Cimon who has been condemned to die from starvation, dedicates herself to visit and clandestinely breastfeed the man every day. This story is told as an example of filial piety, but could also be perceived as a way to enchain women to patriarchy and to the commodification of their body. Pero sans Cimon therefore explores the idea of the woman body used as a milk production machine.
Sam Bourgault (Montreal) studies Computation Arts at Concordia University (2019) and owns a bachelor in Physics Engineering from Polytechnique Montreal (2015). Her work has been exhibited at Ars Electronica Campus Exhibition (2018), Mutek Festival (2017), Art Matters (2018), and the VAV gallery (2018). She works as a research assistant at the Technoculture, Art, and Game lab for professor Rilla Khaled and at ObxLabs for professor Jason Lewis. She participated in LA SERRE live art residency (2018) and will soon be part of the OBORO New Media Grant residency (2019). Finally, Bourgault has performed at RIPA (2019), OFFTA (2019), Nuit Blanche at Livart (2019), LIP (2018), and Algorave (2018), among other events. http://sambourgault.com/
Emma Forgues is a new media artist based in Montreal and she is pursuing a BFA in Computation Arts at Concordia University. She has showcased her work in multiple galleries and festivals in Montreal including MUTEK (2017), Espace Projet (2018), Articule (2018), Eastern Bloc (2018), Livart (2019) and OFFTA (2019) and more. Forgues has been given awards and residencies including the Public Choice Award at Mutek Next Era Competition (2017); a residency at LA SERRE – Vous Etes Ici (2018); and with the collective Somme she received the Oboro New Media Creation Grant Caisse Desjardins. The grant includes a residency and a presentation of their work at the International Marketplace for Digital Art (MIAN) during the 20th edition of the ELEKTRA Festival in June 2019. Her works iO and Mycocene were presented in March 2019 by the artist Alice Jarry at the Behavioral Matter Conference at the Centre Pompidou (Paris, France) as part of The Fabric of the Living exhibition. http://emmaforgues.ca/
Insect Robot Mind, 2019
Paul Tremblay, University Concordia, Intermedia, Studio Arts
The Insect Robot Mind project addresses movements concerning the mimesis of nature in technology. Investigating the impact of our involvement with natural world, the piece is trying to mimic the movements of an insect. The grotesque movements of the machine are there to respect the biomimetic principle of nature as model and to juxtapose how living organisms evolve in response to
different topography. The worm acts as a small model for a bigger design. Through color detection, a software dictates each movements of the robotic harm with the help of multiple servo motors attached to the metal structure. The installation takes the bridge between digital and analogue, which enables the object and the insect to connect not just in terms of their material qualities, but also in terms of social relationships and hierarchies.
Paul Tremblay lives and works in Montreal, currently finishing his degree in from Concordia university. His work is generally about picturing the forces surrounding the process of information, whether it is through photography or materials present in the digital or physical media. Instagram: @z0neinterdite
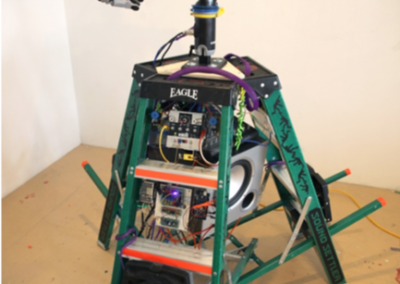
Sand Pattern with Pufferfish, 2019
Yaming Xu and Weiyi He, New York University Shanghai
Sand Pattern with Pufferfish is a structured symmetrical pattern drawn by a Kittenbot robot. A sand table is set up for the pattern drawing. Audiences will see the ball drawing the pattern automatically on the sand table. However, the movement of the ball is controlled by the Kittenbot robot with a magnet attached moving underneath the table. The moving path of the Kittenbot robot is pre-coded. The purpose of this project is to simulate the biological behavior of a Japanese pufferfish: Male pufferfishes use their fins to draw nearly perfect sand patterns underwater in order to attract female pufferfish for reproduction. In order to re-create the sand patterns, we use the sand table and magnets for drawing. The inspiration for this drawing approach comes from the Sisyphus table: a marble rolls by itself on the table creating sand art. It uses a stepper motor that decides the direction and 2 Sisbot boards to control the magnet that pulls the metal ball.
Yaming Xu is a senior student at New York University Shanghai, majoring in Interactive Media Arts, focusing on immersive media and interactive installations. During her junior year, she studied away at Interactive Telecommunications Program at NYU New York. She defines herself as a creative designer and technologist. With both art and tech backgrounds, she specializes in using emerging technology to observe and solve problems. www.dianaxym.com
Weiyi He is a freshman at New York University Shanghai, majoring in Interactive Media Arts. She is a dancer, a basketball player, and a fanatic of traveling. She recently participated in the design and live launch of a giant Rube Goldberg Machine that connected 3 NYU campuses: in Shanghai, New York and Abu Dhabi. For her, just getting started is her edge, for everything is possible for her.
Precision machination
Oliver Heaps-Drolet, UQAM École des arts visuels et médiatiques
This wobbly, crafted world conveys the unbridled freedom of the creative gesture. The assembly of different pulleys and universal joints create a living drawing within the exhibition space. The installation is the result of coping with tensions, multiple adjustments and an evolution of the artist even though at first glance the work may seem very intuitive. The modular system developed by digital process bring forth different possibilities, mutations akin to an unstable organism evolving in its environment. This work is part of a series of projects that put in resonance technical research and artistic practice.
image: Secret Lives of Machines, Ray LC
Organisers
David St-Onge (Program Chair) – holds a PhD in mechanical engineering, space robotics, from the University Laval, Canada where he also completed his master’s degree on aircraft control. He worked a decade in the field of arts (theatre, museums and circus): as the production director of a workshop, and as an R&D engineer in interactive media. He also completed a master in project management and
Email: [email protected]
Damith Herath (Program Co-chair) – holds a PhD in Robotics from the University of Technology, Sydney for his research work at the ARC Centre of Excellence for Autonomous Systems (CAS) on Simultaneous Localisation and Mapping (SLAM). Damith has nearly two decade of experience leading multidisciplinary robotic research and industry projects and is the founding chair of the International Workshop on Robotics & Art at ICRA 201. He is currently an Asst. Professor and leads the Collaborative Robotics Lab and the Robots, Art, People and Performance Lab at the Human-Centred Computing Research Centre at the University of Canberra, Australia.
Email: [email protected]
Jean-Paul Laumond (Program Co-chair) – IEEE Fellow, is a roboticist. He is Directeur de Recherche at CNRS. His research is devoted to robot motion. He has published more than 150 papers in international journals in Robotics, Computer Science, Control and Neurosciences. He has been the 2011-2012 recipient of the Chaire Innovation technologique Liliane Bettencourt at Collège de France in Paris. He is a member of the French Academy of Technologies and Academy of Sciences.
Email: [email protected]